Communication is a key component in multi-agent reinforcement learning (MARL) for mitigating partial observability,
yet prior approaches often rely on inefficient information exchange or fail to transmit sufficient state information.
To address this, we propose LLM-driven Multi-Agent Communication (LMAC), which leverages an LLM's
reasoning capability to design a communication protocol that enables all agents to reconstruct the underlying state
as accurately and uniformly as possible. LMAC iteratively refines the protocol using an explicit state-awareness
criterion, improving state recovery while narrowing differences in agents' knowledge.
Experiments on diverse MARL benchmarks show that LMAC improves state reconstruction across agents and yields
substantial performance gains over prior communication baselines.
Overview
LMAC asks a large language model to design and refine an executable, agent-wise communication
protocol from natural-language descriptions of the task, the global state, and each agent's observations.
Refinement is driven by a state-awareness criterion that turns offline transition data into language feedback,
so the LLM adds only the messages required for accurate and balanced state recovery.
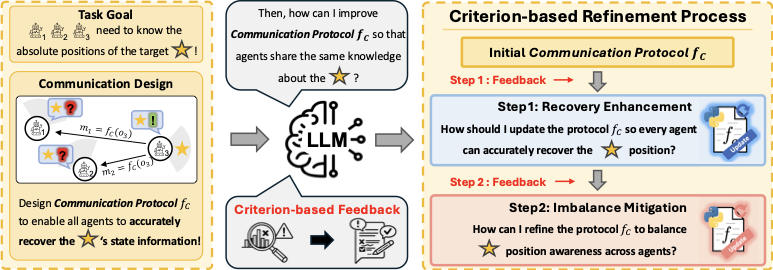
Protocol refinement in LMAC. Given natural-language descriptions of the task goal and
the state and observation dimensions, the LLM designs an initial communication protocol to support
accurate state reconstruction. The protocol is then refined via criterion-based two-step feedback:
Step 1 improves each agent's state reconstruction accuracy, and
Step 2 reduces information gaps across agents.
Key Contributions.
An LLM-driven framework that designs code-based communication protocols from task instructions, without online LLM interaction at execution time.
A State-Awareness Indicator (SAI) that converts offline transition data into criterion-based language feedback for iterative protocol refinement.
A two-step refinement objective (recovery enhancement and imbalance mitigation) that explicitly improves both accuracy and uniformity of state recovery across agents.
Consistent gains over communication baselines on SMAC-Comm, LBF, GRF, and SMACv2, often matching or surpassing the QMIX+State.
Why a New Protocol?
Existing communication methods can still leave inefficiencies in recovering state information.
On a StarCraft II task where allies must infer an enemy position, even strong baselines like
MASIA and FullComm remain inaccurate or produce non-uniform reconstruction across agents.
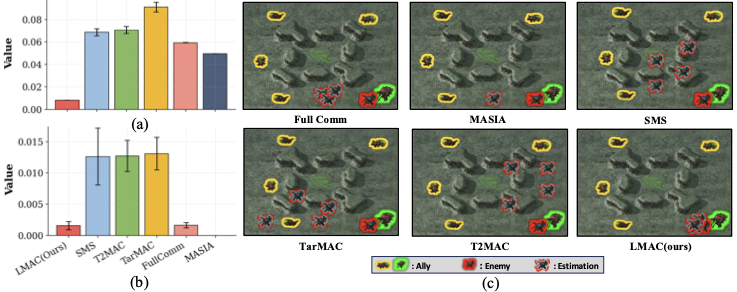
Comparison on StarCraft II after 2M timesteps.
(a) Average reconstruction error of the enemy position.
(b) Inter-agent variance of the reconstruction error.
(c) Ground-truth positions of allies (green/yellow) and the enemy (red), and each ally's estimated enemy position.
Prior methods either fail to recover the enemy position or do so inconsistently across agents. LMAC achieves both
low error and low inter-agent variance.
Method
LMAC builds on Reflexion-style iterative refinement, replacing the fixed feedback with
step-wise feedback instructions tied to two explicit objectives. The output is an
executable Python protocol that maps each agent's observation history to agent-specific messages.
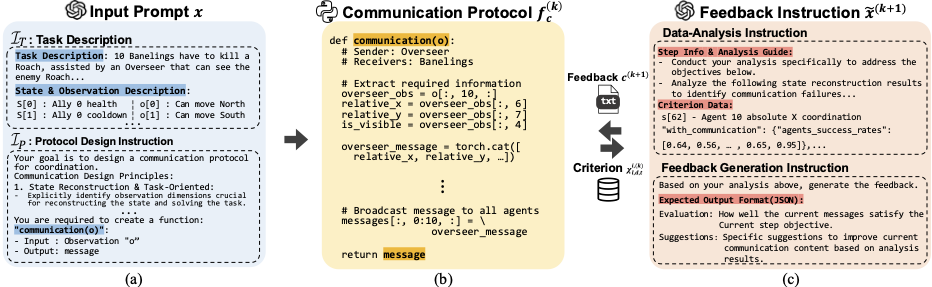
Iterative refinement framework.
(a) Input prompt x combines the task description and protocol design instruction.
(b) The LLM generates an executable protocol that maps local observations to agent-specific messages.
(c) Criterion-based feedback, consisting of an analysis instruction and a feedback generation instruction,
guides the next refinement step.
Three Refinement Steps
k = 0
Protocol Initialization
From the task prompt, the LLM generates an initial executable protocol that maps observations to a minimal but semantically meaningful message.
k = 1
Recovery Enhancement
Using the agent-wise recovery success rate, the protocol is refined to add task-relevant information where state reconstruction is failing.
k = 2
Imbalance Mitigation
Using the inter-agent knowledge imbalance, the protocol is refined so that state recovery becomes consistent across all agents.
State-Awareness Indicator (SAI)
To turn quantitative reconstruction quality into language feedback, LMAC trains an auxiliary decoder
that reconstructs the global state from each agent's trajectory, with and without the message.
Per-dimension accuracy is thresholded into a binary indicator and aggregated into the two criteria above.
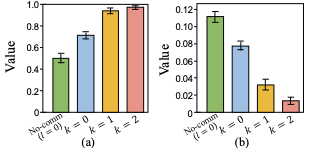
Iteration-wise evaluation: (a) recovery success rate increases steadily,
while (b) inter-agent knowledge imbalance decreases, indicating both more accurate
and more uniform state awareness across agents.
Meta-Cognitive Representation for MARL Training
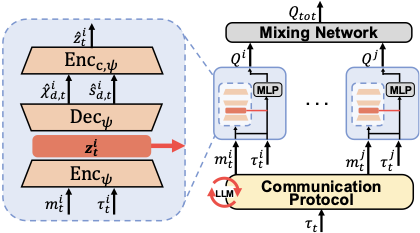
The pre-designed protocol is applied during MARL training to produce agent-specific messages.
Rather than feeding raw messages to agents, LMAC introduces an encoder–decoder pair that produces a
latent representation used for state inference and decision-making. The encoder is supervised by both
state reconstruction and the SAI signal, and a cycle-consistency loss discourages redundant content,
encouraging compact, task-relevant features.
Overall framework. The LLM-designed protocol is integrated into CTDE training via a meta-cognitive latent module.
Experiments
We evaluate LMAC on four benchmarks: SMAC-Comm (bane_vs_hM, 1o_10b_vs_1r,
5z_vs_1ul, 2o_20b_vs_2r), LBF, GRF, and the more stochastic
SMACv2. Baselines include FullComm, MASIA, TarMAC, SMS, T2MAC, NDQ, MAIC, COLA, and the QMIX+State upper-bound.
Unless otherwise specified, the backbone LLM is gpt-4.1-2025-04-14. All results are averaged over 5 seeds.
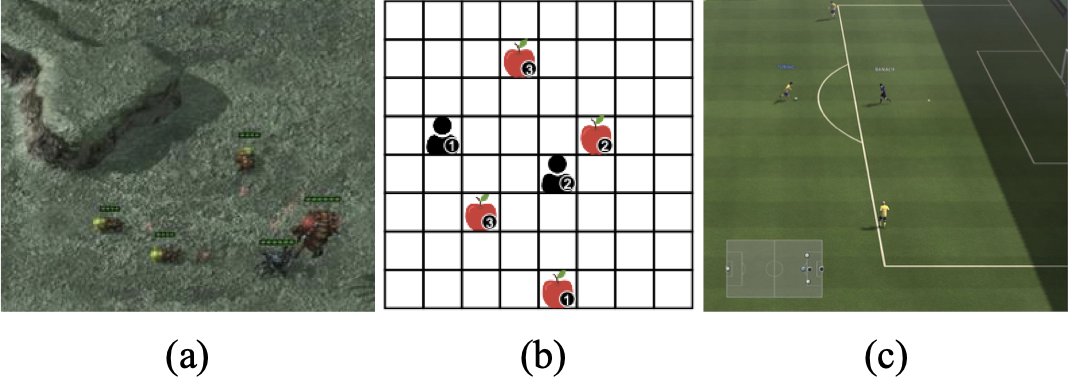
MARL benchmarks used in our experiments: (a) SMAC-Comm, (b) LBF, and (c) GRF.
Performance Comparison
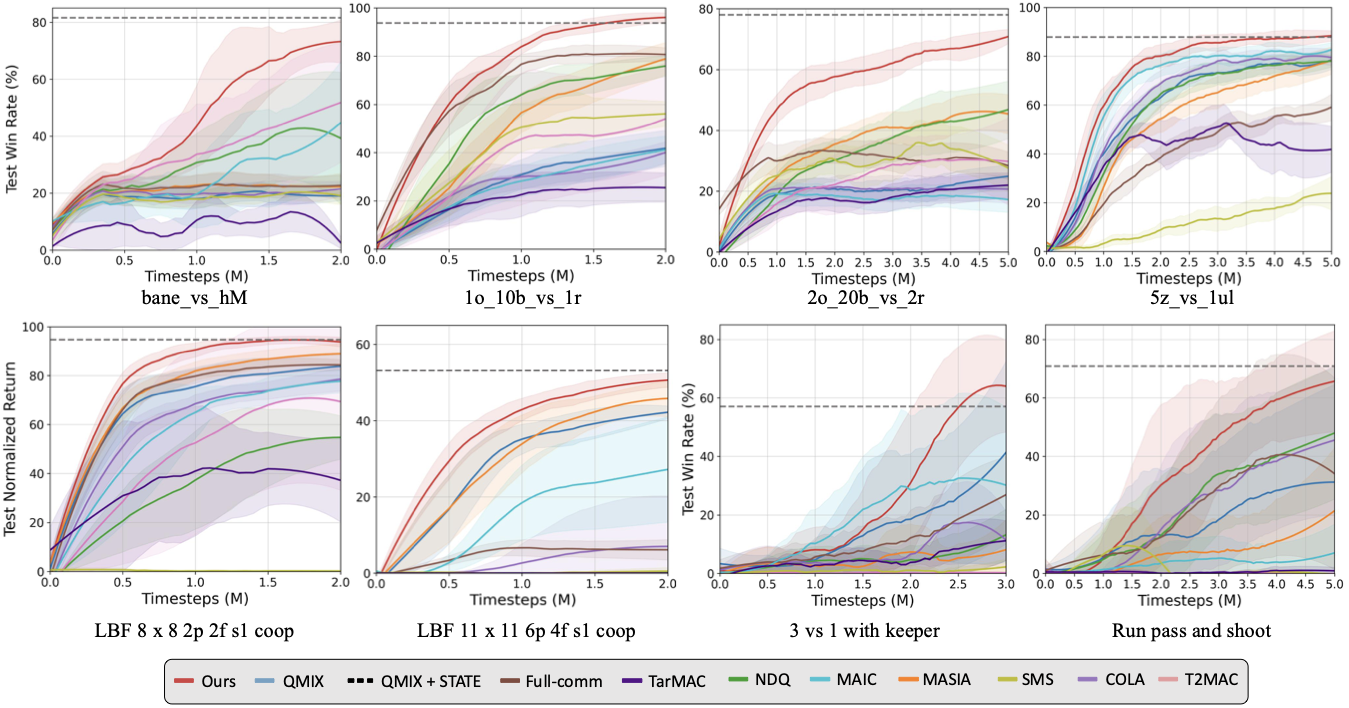
Success rates across SMAC-Comm, LBF, and GRF benchmarks.
On SMAC-Comm, LMAC converges faster and achieves higher final success rates across all four scenarios,
with particularly large gains on bane_vs_hM and the large-scale 2o_20b_vs_2r, indicating strong
scalability when state recovery is difficult or the number of agents increases. The results nearly match the upper-bound
QMIX+State, suggesting the designed protocols capture critical state information.
On LBF, LMAC again learns faster and approaches QMIX+State, supporting that refined communication enables
sufficient state reconstruction for coordinated behavior. On GRF, LMAC even outperforms QMIX+State:
because GRF has high-dimensional observations, the latent module compresses messages into compact task-relevant features
rather than feeding the full raw state, enabling faster convergence.
SMACv2: Test Win Rate (%) at 3M Steps
Algorithm
terran_5_vs_5
protoss_5_vs_5
zerg_5_vs_5
QMIX
61.69 ± 5.4
48.44 ± 4.3
34.79 ± 4.7
FullComm
18.44 ± 1.7
16.93 ± 3.1
6.83 ± 1.8
TarMAC
29.68 ± 2.2
22.56 ± 2.1
15.47 ± 2.2
NDQ
59.20 ± 5.2
48.03 ± 4.2
38.75 ± 2.9
MAIC
63.80 ± 3.4
51.93 ± 2.4
38.59 ± 2.8
MASIA
54.72 ± 7.0
32.43 ± 3.7
34.22 ± 2.6
SMS
34.00 ± 3.2
27.00 ± 5.8
13.53 ± 3.6
COLA
10.29 ± 9.5
0.01 ± 0.0
0.19 ± 0.3
T2MAC
61.67 ± 2.5
48.16 ± 5.6
35.09 ± 3.4
QMIX+State
64.77 ± 2.79
56.40 ± 2.33
40.06 ± 3.39
LMAC (Ours)
67.87 ± 2.77
57.96 ± 4.02
42.18 ± 4.37
SMACv2 randomizes unit types, positions, and team compositions across episodes, introducing severe distribution shifts.
Under this challenging setting, LMAC consistently outperforms all communication baselines and even surpasses QMIX+State,
suggesting that the LLM-designed protocol filters task-relevant features more effectively than directly utilizing the raw global state.
Trajectory Analysis
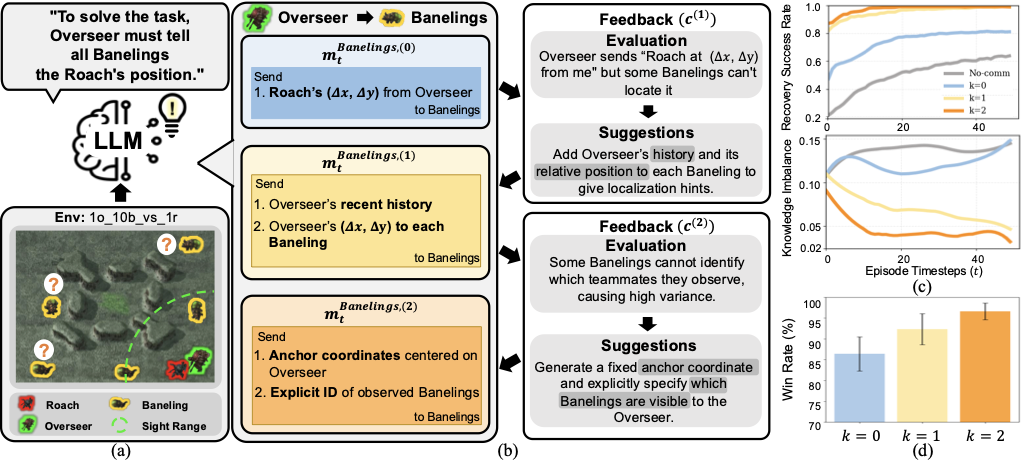
We perform a trajectory-level analysis on SMAC 1o_10b_vs_1r to inspect how the protocol evolves
across refinement steps. 10 Banelings must converge on a Roach with positional cues from the Overseer.
At k=0 the Overseer broadcasts the Roach's relative offset (Δx, Δy), which enables
partial localization but remains insufficient without the Overseer's own position. At k=1, feedback identifies
this gap and adds the Overseer's relative position and recent history as localization cues. At k=2,
variance-based feedback reveals that some Banelings cannot disambiguate which teammates they observe, so the protocol
introduces a fixed anchor coordinate centered on the Overseer and explicit IDs for observed agents.
Protocol refinement analysis on SMAC-Comm 1o_10b_vs_1r.
(a) Task scenario with Overseer, Roach, and Banelings under partial observability;
(b) protocol messages and corresponding feedback at each step k;
(c) trajectory-level recovery success rate and inter-agent knowledge imbalance with (k = 0, 1, 2) or without messages (No-comm);
(d) average win rates across steps. The recovery success rate increases at step 1, the inter-agent imbalance
decreases at step 2, and learning performance improves correspondingly.
Ablation Study (SMAC-Comm)
(a) Component Evaluation
Setting
Win Rate (%)
w/o Cons
66.5 ± 2.1
w/o SAI
76.6 ± 5.6
k = 0
68.5 ± 3.8
k = 1
77.8 ± 2.2
k = 2 (Ours)
82.9 ± 1.9
(b) LLM Variants
LLM
Win Rate (%)
GPT-4.1
82.9 ± 1.9
GPT-4.1-mini
79.8 ± 1.5
GPT-o1-mini
81.8 ± 2.9
Claude-Opus
81.9 ± 2.6
Gemini-2.5-Flash
80.8 ± 1.6
(c) Threshold α
α
Win Rate (%)
0.0005
77.2 ± 2.1
0.002
79.3 ± 2.8
0.005
80.5 ± 1.7
0.05 (Ours)
82.9 ± 1.9
0.5
80.2 ± 3.2
(a) Performance improves steadily as the refinement step progresses; removing the consistency loss
(w/o Cons) clearly hurts, showing that eliminating redundant information in messages is crucial, and removing SAI
also degrades performance, confirming that knowing the recovered state and its reliability is essential.
(b) All recent LLMs achieve strong performance with GPT-4.1 the highest; smaller and more efficient
models (GPT-4.1-mini, o1-mini) still perform competitively, demonstrating that the multi-step refinement process,
not a specific model, is the key driver.
(c) Performance peaks at α = 0.05 and remains stable for larger values, indicating the method
is not highly sensitive to this hyperparameter.
Conclusion
We propose LMAC, an LLM-driven communication framework for cooperative MARL that promotes unified
state awareness under partial observability. LMAC iteratively refines an executable, agent-wise protocol via
multi-step feedback, explicitly improving task-relevant state recovery while reducing inter-agent knowledge imbalance.
The resulting protocol is integrated into CTDE learning through a meta-cognitive latent module that supports state
reconstruction and reliability calibration, with a cycle-consistency constraint encouraging compact and reconstructable
representations. Across multiple benchmarks, LMAC consistently improves both coordination and team performance over
prior communication methods.
Cite
@inproceedings{bae2026lmac,
title = {LLM-Guided Communication for Cooperative Multi-Agent Reinforcement Learning},
author = {Sangjun Bae and Yisak Park and Sanghyeon Lee and Seungyul Han},
booktitle = {Proceedings of the 43rd International Conference on Machine Learning (ICML)},
year = {2026}
}